Satellietbeelden kunnen mogelijk een nuttige bijdrage leveren aan het waterbeheer. De satelliet Sentinel-1 geeft buiten het groeiseizoen om al een vrij goed beeld van het bodemvochtgehalte. Hiermee kan bijvoorbeeld de berijdbaarheid van landbouwpercelen in kaart gebracht kan worden. Ook is een data-assimilatietool ontwikkeld die ingezet kan worden om simulaties met het Landelijk Hydrologisch Model te verbeteren.
Download hier de pdf van dit artikel.
Wereldwijd heerst onder hydrologen de consensus dat bodemvochtdata een groot aantal hydrologische en agrarische toepassingen kent, zoals peilbeheer, afvoervoorspellingen en de optimalisatie van gewasopbrengst. Mede om deze reden hebben meerdere onderzoeken zich gericht op de ontwikkeling van methoden voor het schatten van bodemvocht uit satellietdata [1], [2], [3]. Hierbij gaat specifieke aandacht uit naar het microgolfbereik van het spectrum, vanwege het vermogen om door wolken, vegetatie en delen van de bodem heen te kunnen kijken. In het algemeen geldt dat hoe langer de golf, hoe dieper in de bodem gekeken kan worden en hoe minder het signaal wordt beïnvloed door vegetatie. Voor bodems geldt als de maximale penetratiediepte ongeveer een kwart golflengte [4]. Dit betekent dat met straling gemeten in L-band (1,4 GHz, 21,4 cm golflengte), de frequentieband die het gevoeligst is voor water, het vochtgehalte van de bovenste vijf centimeter van de bodem bepaald kan worden.
Succesvolle onderzoeken (zie bijvoorbeeld [5], [6]) hebben geleid tot investeringen in bodemvochtsatellieten, zoals de Soil Moisture and Ocean Salinity-satelliet (SMOS) van de ESA (sinds 2009) en de Soil Moisture Active/Passive (SMAP) van de NASA, sinds 2015. Voor toepassingen in het Nederlandse regionale waterbeheer hebben deze echter een te lage ruimtelijke resolutie, 40 bij 40 kilometer. Microgolfdata met een hoge ruimtelijke resolutie kan verkregen worden met de Synthetic Aperture Radar-techniek(SAR), zoals toegepast op de Sentinel-1-satellieten.
De Sentinel-1-missie maakt deel uit van het Europese Copernicus-programma en bestaat uit twee satellieten (Sentinel-1A sinds april 2014 en Sentinel-1B sinds april 2016) die beide uitgerust zijn met een SAR op de C-band (5.405 GHz, 5.6 cm golflengte). Tezamen zorgen Sentinel-1A en -1B ervoor dat van grote delen van Nederland om de twee dagen een beeld beschikbaar is met een pixelgrootte van 10 x 10 meter.
Hoewel Sentinel-1 niet specifiek ontworpen is als bodemvochtsatelliet is er voldoende wetenschappelijk bewijs dat ook deze waarnemingen gebruikt kunnen worden om bodemvochtinformatie te verkrijgen [7], [8]. Daarbij komt dat Sentinel-1 de eerste operationele satellietmissie is met een SAR-systeem. Dit betekent dat de data vrij beschikbaar is (onder andere via https://scihub.copernicus.eu/) en de continuïteit voor een langere periode voorzien.
In deze context zijn de Universiteit Twente en Wageningen Universiteit in oktober 2015 van start gegaan met het onderzoeksproject ‘Optimizing Water Availability with Sentinel-1 Satellites’ (zie kader).
Het bepalen van bodemvocht met Sentinel-1 speelt hierbij een belangrijke rol, maar minstens zo belangrijk is de vertaling van het vochtgehalte in de bovenste centimeters naar informatie waarmee waterbeheerders beslissingen kunnen nemen. In overleg met diverse waterbeheerders richt dit deelproject zich op de berijdbaarheid van landbouwpercelen en vochtbeschikbaarheid voor gewassen.
Dit artikel geeft een beschrijving van de studiegebieden en de metingen die verricht zijn en de eerste resultaten ten aanzien van i) bodemvochtschattingen uit satellietdata, ii) de relatie tussen bodemvocht en de berijdbaarheid van landbouwpercelen en iii) de vergelijking van LHM-simulaties met bodemvochtgegevens uit veldmetingen, satellietobservaties en de nieuw ontwikkelde data-assimilatiemogelijkheden.

Afbeelding 1. Ligging van de studiegebieden in Nederland. A: Twente, B: De Raam, C: proefboerderij Dronten, D: Wilnis
Studiegebieden en metingen
Afbeelding 1 laat de vier geselecteerde studiegebieden zien. In elk gebied zijn meerdere locaties uitgerust met instrumentatie voor het automatisch meten van bodemvochtgehalte en -temperatuur, bestaande uit (maximaal vijf) Decagon 5TM-sensoren en een datalogger die ieder kwartier de data opslaat. De sensoren zijn geïnstalleerd op dieptes van 5, 10, 20, 40 en 80 centimeter onder het maaiveld om de gehele wortelzone te kunnen monitoren. Zie kader en [9] voor meer informatie.
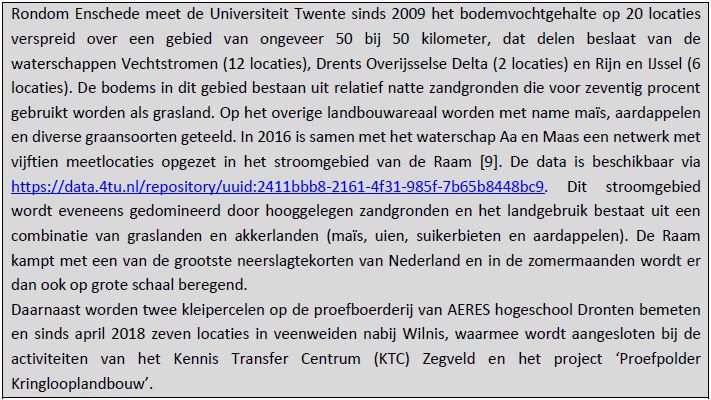
Naast de geautomatiseerde meetstations hebben onderzoekers arbeidsintensieve meetcampagnes uitgevoerd. Tijdens de groeiseizoenen van 2016 en 2017 zijn op diverse plekken binnen een aantal percelen metingen verricht van het vochtgehalte in de bovenste 5 centimeter, het bladoppervlakte van het gewas, de ruwheid en de penetratieweerstand van de bodem (zie afbeelding 2). Het doel van deze metingen is om de bodemvochtschattingen uit Sentinel-1-observaties te analyseren en relaties te leggen tussen het bodemvochtgehalte en de penetratieweerstand van de bodem.
Afbeelding 2. Het handmatig meten van: a) het bodemvochtgehalte, b) de penetratieweerstand, c) het bladoppervlakte, d) de ruwheid van het bodemoppervlak
Bodemvocht uit Sentinel-1-beelden
Sentinel-1 zendt microgolven uit en meet de hoeveelheid teruggekaatste straling. Dit is afhankelijk van de ruwheid en het vochtgehalte aan het aardoppervlak, bestaande uit de bodem en vegetatie. Deterministische methodes (zie voor een overzicht [7]) om bodemvocht te bepalen zijn operationeel lastig toe te passen, omdat ze gebruik maken van gegevens die op regionale schaal moeilijk verkrijgbaar zijn. Dit geldt niet voor de Change Detection-methode [10] waarbij de benodigde informatie uit een tijdreeks van Sentinel-1-beelden gehaald wordt. Door te schalen tussen een minimale en maximale waarneming op een specifieke locatie wordt een zogenaamde ‘bodemvochtindex’ verkregen, variërend van 0 voor droge tot 1 voor natte omstandigheden. De belangrijkste aannames bij de toepassing van Change Detection zijn dat alle veranderingen in het signaal van Sentinel-1-toegeschreven worden aan het bodemvochtgehalte en dat deze afhankelijkheid lineair is.
Voor dit artikel zijn de minimale en maximale waarden bepaald uit 395 beelden van de periode van 1 maart 2016 tot 1 maart 2018. Vervolgens is de bodemvochtindex omgezet naar een volumetrisch bodemvochtgehalte door bodemvochtindexwaarden 0 en 1 gelijk te stellen aan, respectievelijk, het ‘verwelkingspunt’ en het ‘verzadigde’ bodemvochtgehalte van de BOdemFysische EenhedenKaart,BOFEK2012 [11].
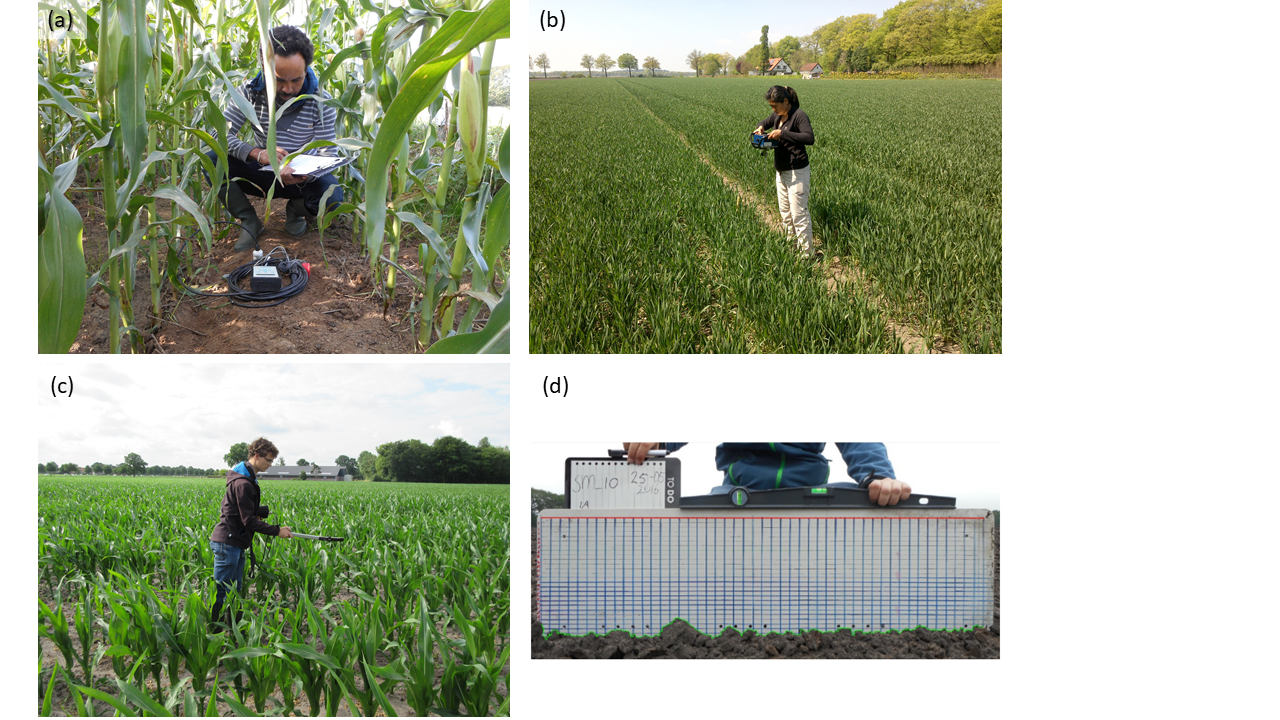
Afbeelding 3. Top 5-cm bodemvochtkaart verkregen uit een Sentinel-1-beeld van 22 februari 2017 van de regio Twente
Afbeelding 3 geeft een voorbeeld van een bodemvochtkaart bepaald met Sentinel-1. Op dit beeld van 22 februari 2017 zijn duidelijk regionale verschillen te zien. Ten noorden van Vriezenveen en ten zuiden van de Sallandse Heuvelrug is het bijvoorbeeld natter dan in veel andere gebieden. In afbeelding 4 zijn de gemiddelde bodemvochtgehaltes zoals waargenomen boven Twente en in het veld gemeten uitgezet tegen tijd. De afbeelding laat zien dat de Sentinel-1-waarden in de winter goed overeenkomen met de metingen, maar in de zomerperioden aanzienlijk afwijken. Dit komt doordat veranderingen van vegetatie in de Change Detection-methode niet worden meegenomen, terwijl deze veranderingen juist in het groeiseizoen groot zijn. Andere afwijkingen treden op tijdens situaties met overstroming, sneeuw en vorst, omdat de satellietobservaties hierdoor sterk worden beïnvloed.
Deze resultaten laten goed zien dat tijdens het groeiseizoen nog veel te winnen valt, als er voor de vegetatie-effecten gecorrigeerd kan worden. Dit vormt dan ook de focus voor het vervolgonderzoek.

Afbeelding 4. Tijdreeksen van bodemvochtgehaltes uit Sentinel-1, gemiddeld over Twente en de gemiddeld gemeten waarden; de correlatie tussen het bodemvochtgehalte uit Sentinel-1 en de metingen is 0.64 en de wortel van het gemiddelde van de gekwadrateerde verschillen is 0.07 m3/m3
Berijdbaarheid van landbouwpercelen bepaald uit bodemvochtdata
De moderne landbouw is afhankelijk van zware machines voor onder andere de grondbewerking en het oogsten van het gewas. Een negatief gevolg van het gebruik van zware machines is bodemverdichting. Deze vorm van landdegradatie leidt tot verminderde wortelgroei en bodemleven [12], wat nadelig is voor de gewasproductie. Een manier om verdichting tegen te gaan is door alleen zware machines te gebruiken wanneer de bodem het gewicht van de machine kan dragen. Actuele informatie over de berijdbaarheid van het land kan inzicht geven in het risico op bodemverdichting.
De berijdbaarheid van landbouwpercelen is afhankelijk van de mechanische sterkte van de bodem. Om een schatting te maken van de berijdbaarheid van een perceel wordt vaak de penetratieweerstand gebruikt. Met een penetrometer (zie foto afbeelding 2) is de penetratieweerstand relatief snel te meten. De penetratieweerstand is de kracht per oppervlakte die nodig is om de penetrometer over een bepaalde lengte de grond in te duwen. Bodemeigenschappen die de penetratieweerstand bepalen zijn het bodemvochtgehalte, de textuur en de bulkdichtheid. Van deze drie factoren varieert het bodemvochtgehalte het meest in de tijd. De berijdbaarheid van landbouwpercelen is daarom goed af te leiden van bodemvochtkaarten uit satellietbeelden, zoals gepresenteerd in de vorige paragraaf.
Tijdens de groeiseizoenen van 2016 en 2017 is het effect van het bodemvochtgehalte op berijdbaarheid onderzocht door gelijktijdig het bodemvochtgehalte en de penetratieweerstand te meten. De penetratieweerstand is bepaald voor een diepte van 20 centimeter. Dit komt overeen met de bodemlaag die het gewicht van de machine moet dragen. Afbeelding 5 laat de penetratieweerstand zien als functie van het bodemvochtgehalte gemeten in de bovenste 5 centimeter voor graslanden en akkerland (maïs, tarwe, aardappel, suikerbiet, chicorei). Zoals verwacht op basis van eerdere onderzoeken [13] neemt de penetratieweerstand en dus de berijdbaarheid van het perceel af naarmate de bodem natter wordt. Akkerlanden hebben over het algemeen een lagere penetratieweerstand dan graslanden. Dit komt door de jaarlijks terugkerende grondbewerkingen, zoals ploegen, die de penetratieweerstand verlagen, terwijl de graslanden door de jaren heen voortdurend worden verdicht door gebruik van het land. De hoge standaardafwijking geeft echter aan dat de variabiliteit in de gemeten penetratieweerstanden groot is. Dit kan worden toegeschreven aan wortelgroei en de wortelverdeling, evenals aan het landbeheer, zoals het tijdstip en frequentie van het maaien en/of de begrazing door vee.
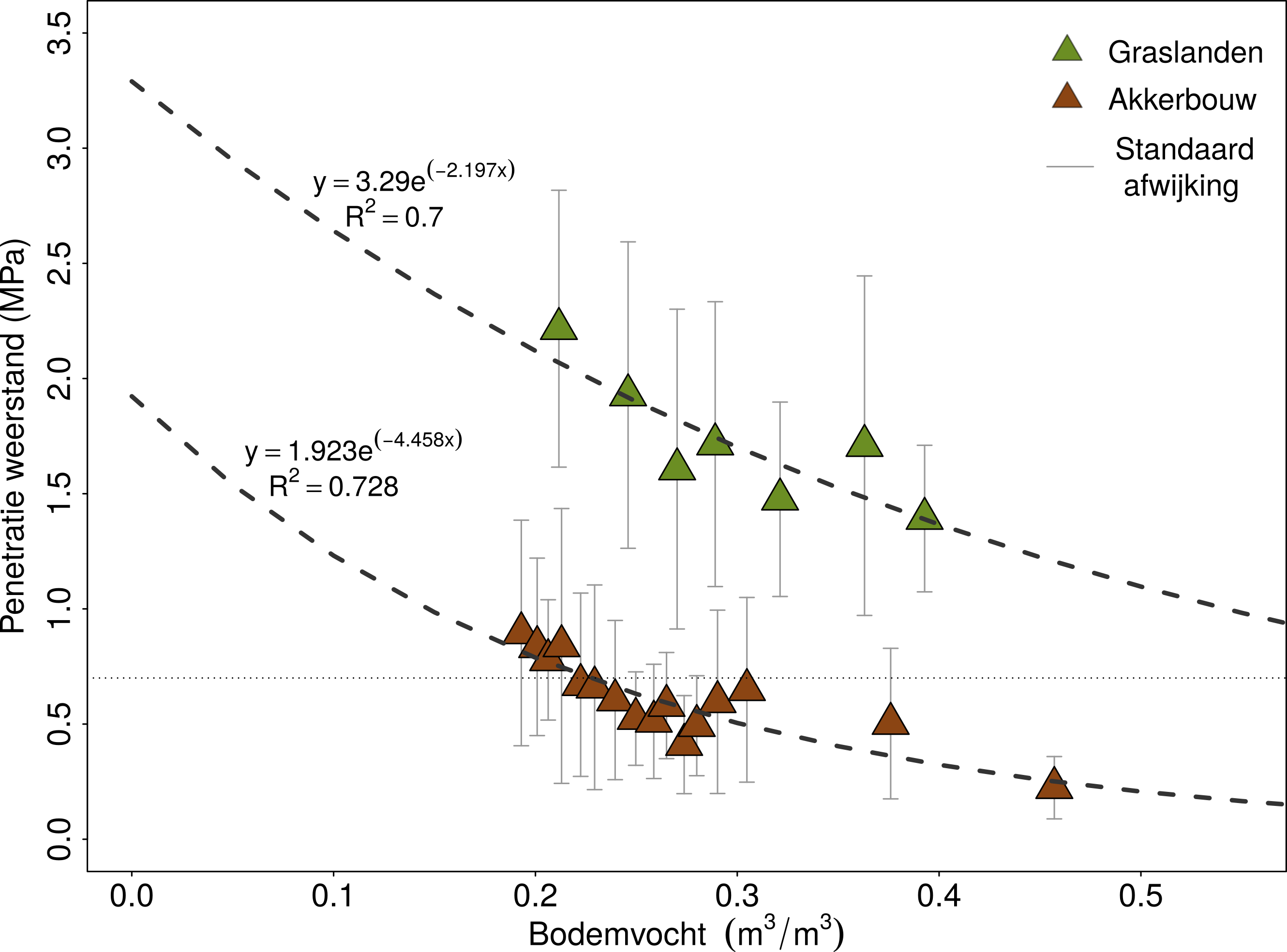
Afbeelding 5. Het gemeten bodemvochtgehalte op 0-5 cm versus de gemeten penetratieweerstand op 0-20 cm. Driehoeken staan voor de gemiddelde waarden en de staven geven de standaardafwijking weer. De horizontaal gestippelde lijn is de 0.7-MPa grenswaarde waarboven de berijdbaarheid volstaat [14]
Door de resultaten uit afbeelding 5 te combineren met bodemvochtkaarten op basis van de satellietdata uit de vorige paragraaf, kan de berijdbaarheid in kaart gebracht worden. Afbeelding 6 laat dit zien met van links naar rechts het bodemvochtgehalte, de penetratieweerstand en de berijdbaarheid.
Als grenswaarde is een penetratieweerstand van 0,7 MegaPascal (MPa) gebruikt. Boven deze waarde wordt de berijdbaarheid geclassificeerd als goed tot zeer goed en eronder als slecht tot zeer slecht [14]. De afbeelding toont welke percelen voldoende draagkracht hebben om landbouwmachines te dragen. Daarnaast worden kwetsbare gebieden binnen percelen aangegeven. Boeren kunnen deze informatie gebruiken om zo het risico op bodemverdichting te reduceren door de grondbewerking aan te passen. Het tijdstip kan aangepast worden, maar ook de bewerking zelf door andere banden te kiezen of door langzamer te rijden.
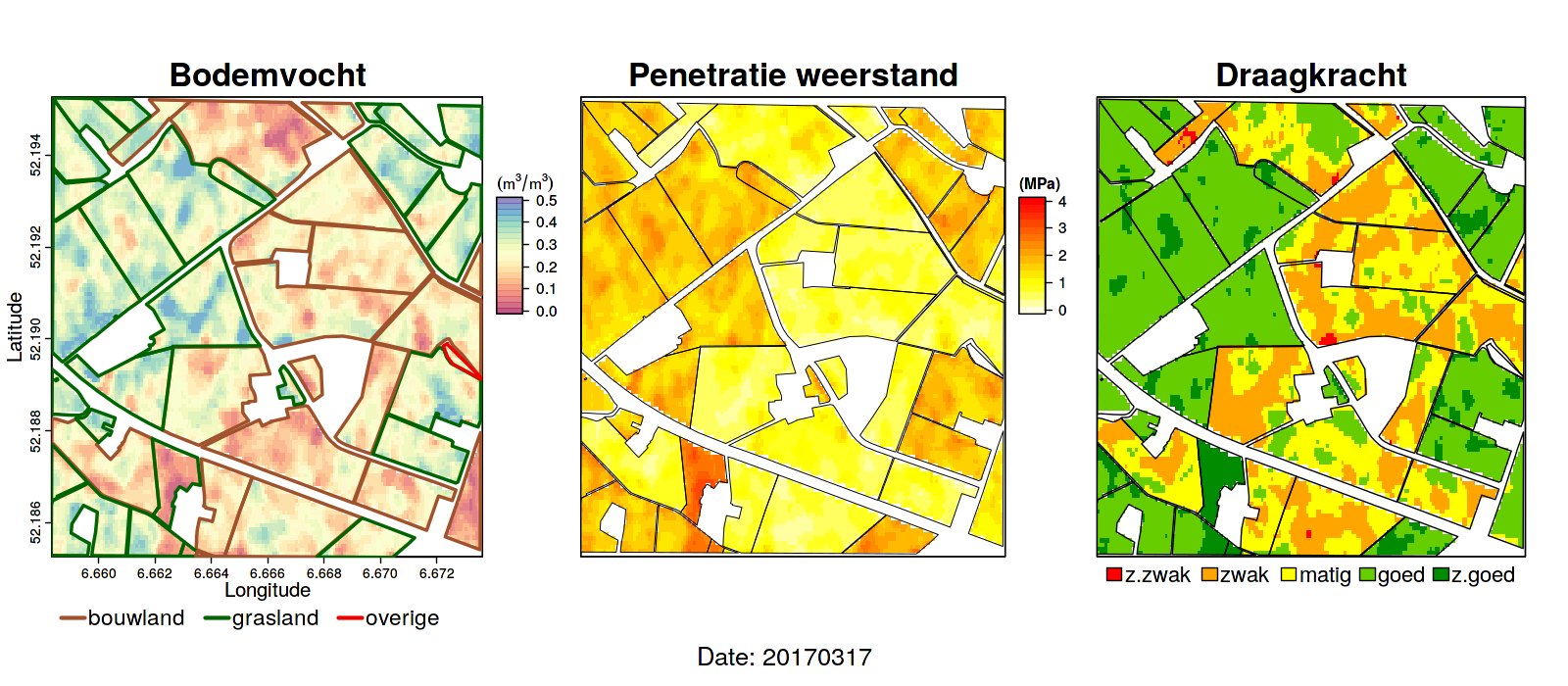
Afbeelding 6. Van links naar rechts: het bodemvochtgehalte o.b.v. Sentinel-1-data van 17 maart 2017 en daaruit afgeleid de penetratieweerstand en de berijdbaarheid. De grenzen van de percelen zijn verkregen uit de Basisregistratie Gewaspercelen 2016 [15]
Vergelijking van LHM-simulaties met Sentinel-1-bodemvochtdata
Hydrologische modellen worden vaak gebruikt om het operationeel waterbeheer te ondersteunen, bijvoorbeeld voor oppervlakte- en grondwatervoorspellingen. Het Nederlands Hydrologisch Instrumentarium (NHI) is ontwikkeld voor het landelijk en regionaal waterbeheer in Nederland [16]. De landelijke implementatie wordt het Landelijk Hydrologisch Model (LHM) genoemd. De nauwkeurigheid van simulaties, met welk model dan ook, is afhankelijk van de modelstructuur, de parameterisatie (landgebruik, bodemtype en ondergrond), de begintoestand van het systeem en opgelegde randvoorwaarden, zoals de neerslag en referentiegewasverdamping. De onzekerheden in de modelstructuur en invoergegevens maken de modeluitkomsten onzeker. De bodemvochtkaarten op basis van satellietdata bieden extra informatie die gebruikt kan worden om deze onzekerheden te reduceren.
Afbeelding 7 geeft over 2015 vier bodemvochtgehaltes voor de regio Twente (afbeelding 7a) en de neerslag gemeten bij het KNMI-station op vliegveld Twenthe (afbeelding 7b). Te zien is dat het bodemvocht toeneemt bij neerslag, maar dat de grootte van deze verandering verschillend is. Elke methode om het bodemvocht te bepalen reageert dus anders. De systematische afwijkingen worden veroorzaakt door intrinsieke verschillen tussen het bodemvochtgehalte zoals gemeten met in-situ sensoren, gemodelleerd met het LHM en geobserveerd met Sentinel-1. De dikte van de bodemlaag waarover het vochtgehalte bepaald wordt varieert bijvoorbeeld per methode. Een sensor meet het vochtgehalte rondom de diepte waarop deze geïnstalleerd is, een model berekent het vochtgehalte geïntegreerd over een laagdikte en een satelliet neemt het vochtgehalte vanaf het maaiveld naar beneden waar.
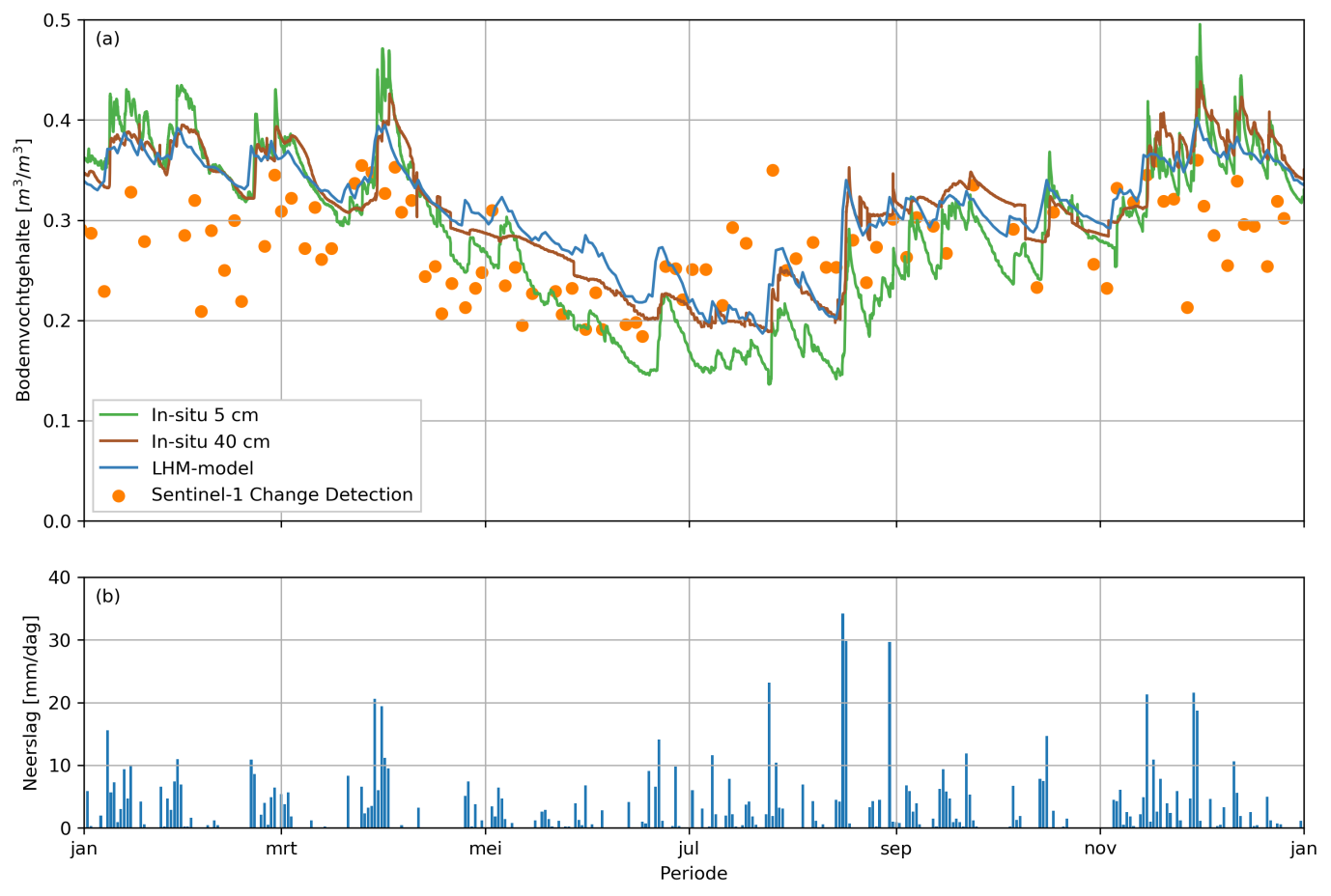
Afbeelding 7. (a) Bodemvochtgehalte voor 2015, gemiddeld over de regio Twente, bepaald uit i) metingen met sensoren op 5 en 40 cm diepte, ii) LHM, en iii) Sentinel-1-data; b) dagelijkse neerslag gemeten bij het KNMI-station op vliegveld Twenthe
Een manier om verschillende bodemvochtinformatie te combineren is data-assimilatie [17]. Bij deze methode worden de toestandsvariabelen (zoals bodemvochtgehalte en grondwaterstand) in het model aangepast aan de hand van waarnemingen uit satellietdata of veldmetingen. Het doel hiervan is om afwijkingen met de werkelijkheid te beperken. Zo krijgen waterbeheerders een betrouwbaardere weergave van de huidige situatie binnen een beheergebied en kunnen zij beter inspelen op lokale problemen. Het interessante van data-assimilatie is dat het niet alleen de modeluitkomst van de geassimileerde toestandsvariabele verbetert, maar ook de berekende waterfluxen, zoals actuele verdamping, grondwateraanvulling en rivierafvoer.
Voor dit project is het open-source data-assimilatie framework van Deltares, OpenDA [18], gekoppeld met het NHI. Dit maakt het nu mogelijk om Sentinel-1 bodemvochtkaarten te assimileren in het LHM.
Referenties
- Jackson, T.J. (1993). III. Measuring surface soil moisture using passive microwave remote sensing. Hydrological Processes, 7 (2), 139-152.
- Su, Z., Troch, P.A., & Troch, F.P. De (1997). Remote Sensing of bare surface soil moisture using EMAC-ESAR data. International journal of remote sensing, 18 (10), 2105-2124.
- Owe, M., Jeu, R.A.M. de, & Walker, J.P. (2001). A methodology for surface soil moisture and vegetation optical depth retrieval using the microwave polarization difference index. IEEE Transactions on Geoscience and Remote Sensing, 39 (8), 1643-1654.
- Schmugge, T.J. (1983). Remote sensing of soil moisture: recent advances. IEEE Transactions on Geoscience and Remote Sensing, 21 (3), 336-344.
- Wigneron, J.-P. et al . (2007). L-band microwave emission of the biosphere (L-MEB) model: description and calibration against data sets over crop field. Remote Sensing of Environment, 107 (4), 639-655.
- Panciera et al. (2014). The soil moisture active passive experiments (SMAPEx): Toward soil moisture retrieval from the SMAP mission. IEEE Transactions on Geoscience and Remote Sensing, 52 (1), 490-507.
- Kornelsen, K.C., & Coulibaly, P. (2013). Advances in soil moisture retrieval from synthetic aperture radar and hydrological application. Journal of Hydrology, 476, 460-489.
- Velde, R. van der, et al. (2012). Soil moisture mapping over the central part of the Tibetan Plateau using a series of ASAR WS images. Remote Sensing of Environment, 120, 175-187.
- Benninga, H.-J.F. et al. (2018). The Raam regional soil moisture monitoring network in the Netherlands. Earth System Science Data, 10, 61-79.
- Wagner, W., Lemoine, G., Borgeaud, M., & Rott, H. (1999). A Study of Vegetation Cover Effects on ERS Scatterometer Data. IEEE Transactions on Geoscience and Remote Sensing, 37(2), 938–948.
- Wösten, J. H. M., et al. (2013). BOFEK2012, de nieuwe, bodemfysische schematisatie van Nederland. Alterra Report 2387, p. 92. Beschikbaar via: http://edepot.wur.nl/247678 14 juni 2018 voor het laatst bezocht.
- Eckelmann W. et al. (2006). Common criteria for risk identification according to soil threats. European Soil Bureau Research Report No. 20, EUR 22185 EN, Office for Official Publications of the European Communities, Luxembourg, p. 94.
- Vaz, C. M., Manieri, J. M., Maria, I. C. de & Tuller, M. (2011). Modeling and correction of soil penetration resistance for varying soil water content. Geoderma 166(1), 92-101.
- Droogers P., Fermont A. & Bouma J . (1996). Effects of ecological soil management on workability and trafficability of a loamy soil in the Netherlands. Geoderma 73, 131-145
- Basisregistratie Gewaspercelen 2016.
- http://www.nationaalgeoregister.nl/geonetwork/srv/dut/catalog.search#/metadata/%7B25943e6e-bb27-4b7a-b240-150ffeaa582e%7D, geraadpleegd 14 juni 2018.
- Lange, W.J de et al. (2014) An operational, multi-scale, multi-model system for consensus-based, integrated water management and policy analysis: The Netherlands, Hydrological Instrument. Environment Modelling & Software, 59, 98-108.
- Liu, Y. et al. (2012). Advancing data assimilation in operational hydrologic forecasting: progresses, challenges, and emerging opportunities. Hydrology and Earth System Sciences, 16, 3863-3887.
- Deltares, www.openda.org, geraadpleegd 14 juni 2018